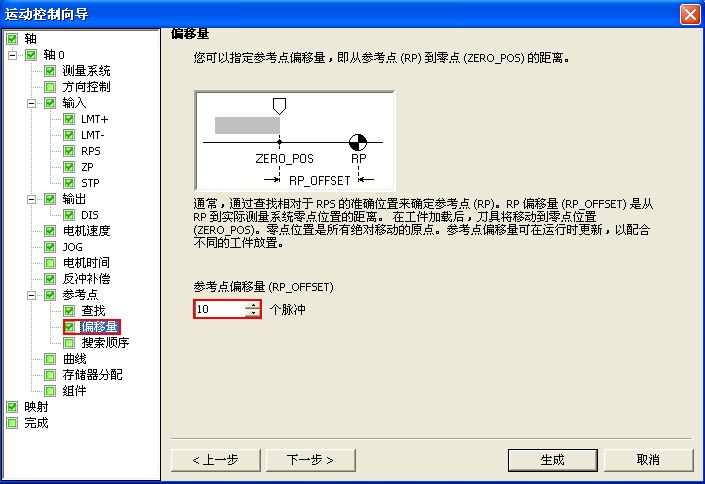
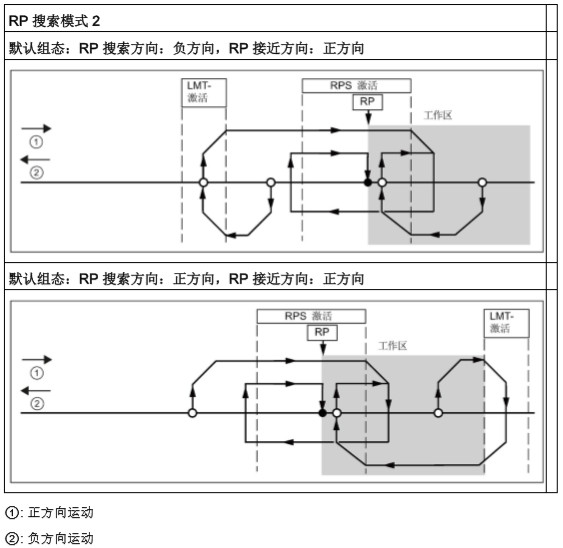
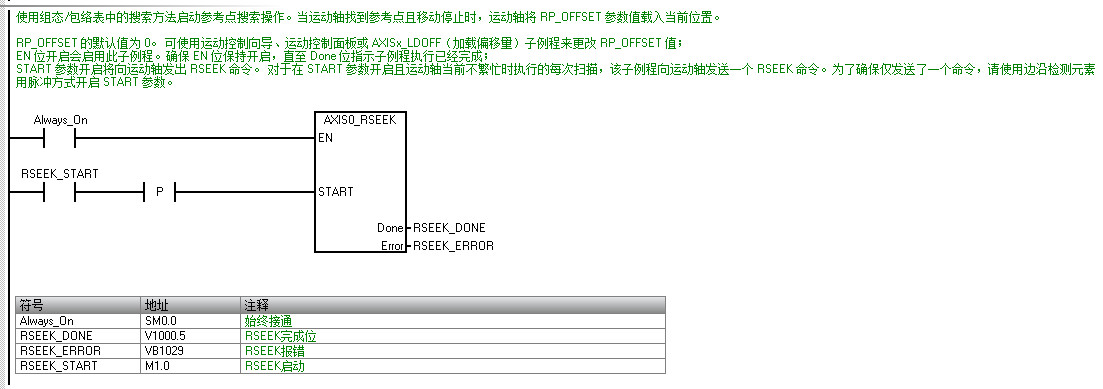
西門子smart200運(yùn)動(dòng)控制--回原點(diǎn)
電話:15721373211
郵箱:15721373211@139.com
網(wǎng)址:http://openxml.net/
地址:上海青浦區(qū)北青公路7171號111-112室